Main Menu
In the realm of robotics, the choice of the right components can significantly determine the performance and efficiency of a project. Among the myriad of components, DC motors for robots play a pivotal role in providing the necessary motion and control for robotic systems. Whether you are a seasoned engineer or a novice hobbyist, understanding the nuances of selecting DC motors can enhance your robotic creations, making them more responsive and capable.
When embarking on your robot-building journey, it becomes essential to consider several key factors that influence the selection of DC motors. These factors range from torque requirements and speed to efficiency and power consumption. A well-informed choice can mean the difference between a smoothly functioning robot and one that struggles to achieve its designed tasks. By exploring the critical aspects of choosing DC motors, you will gain insights that build a solid foundation for your robotic projects, ensuring optimal performance tailored to your unique needs.
This guide will walk you through the top ten tips for selecting the perfect DC motors for your robots, equipping you with the knowledge to make informed decisions. Each tip is designed to simplify the selection process, allowing you to focus on innovation and creativity in your robotic designs while ensuring reliability and effectiveness in operation.
When embarking on robot projects, understanding the fundamentals of DC motors is essential. DC motors are widely used in robotics due to their simplicity, efficiency, and ease of control. They convert electrical energy into mechanical energy through the interaction of magnetic fields, allowing for precise movement and speed control. The basic components include a rotor, stator, commutator, and brushes, all of which work together to enable rotation. Familiarity with these components will help you make informed choices when selecting a motor for your project.
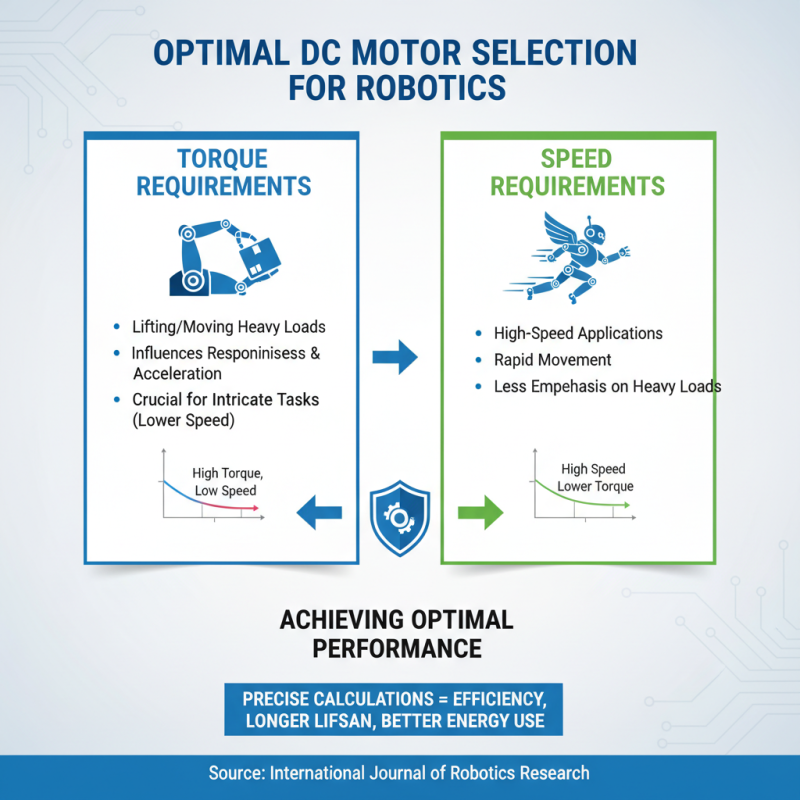
Furthermore, it is crucial to grasp the key specifications of DC motors that influence their performance in robotic applications. Consider factors such as torque, speed, and voltage ratings, as they directly impact how well a motor will suit specific tasks. The torque determines the motor's ability to move heavy loads, while the speed rating affects how quickly the robot can operate. Additionally, understanding the power requirements can aid in ensuring the motor is compatible with your robot’s power supply. By solidifying your knowledge of these basics, you can effectively select the right DC motors that will enhance your robotics projects and achieve desired operational goals.
| Tip | Description | Considerations | Examples of Applications |
|---|---|---|---|
| 1. Determine the Required Torque | Identify the torque needed to move your robot based on weight and load. | Calculate before selecting a motor to avoid underperformance. | Robotic arms, mobile robots. |
| 2. Evaluate Speed Requirements | Consider how fast the motors need to operate for effective performance. | Balance speed with torque for optimal results. | Drones, line-following robots. |
| 3. Select the Right Voltage | Choose a voltage compatible with your power supply and components. | Standard voltages are typically 6V, 12V, or 24V. | Electric carts, automated guided vehicles. |
| 4. Consider Motor Type | Different motor types (brushed vs brushless) have distinct characteristics. | Brushed motors are simpler; brushless motors have higher efficiency. | RC vehicles, robotic vacuum cleaners. |
| 5. Assess Efficiency Ratings | Look for motors with high efficiency to extend battery life. | Efficiency can affect overall robot performance. | Solar-powered robots, endurance robots. |
| 6. Review Size and Weight | Make sure the motor fits within the design constraints of your robot. | Larger motors provide more power but increase weight. | Compact robots, miniature applications. |
| 7. Check for Compatibility | Ensure the motor works with your existing electronics and control systems. | Evaluate sensor and controller compatibility. | Fully automated systems, machine learning-based robots. |
| 8. Research Motor lifespan | Look for motors with good durability and lifespan based on usage conditions. | Consider operational environments. | Industrial robots, outdoor robots. |
| 9. Analyze Cost vs Performance | Balance cost with the performance you need for your project. | Invest in quality where it matters most. | Cost-sensitive projects, high-performance applications. |
| 10. Plan for Future Upgrades | Choose motors that allow for easy upgrading or replacement. | Consider modularity in design. | Prototype projects, educational robotics. |